-

- Reference

-

- Render output

-
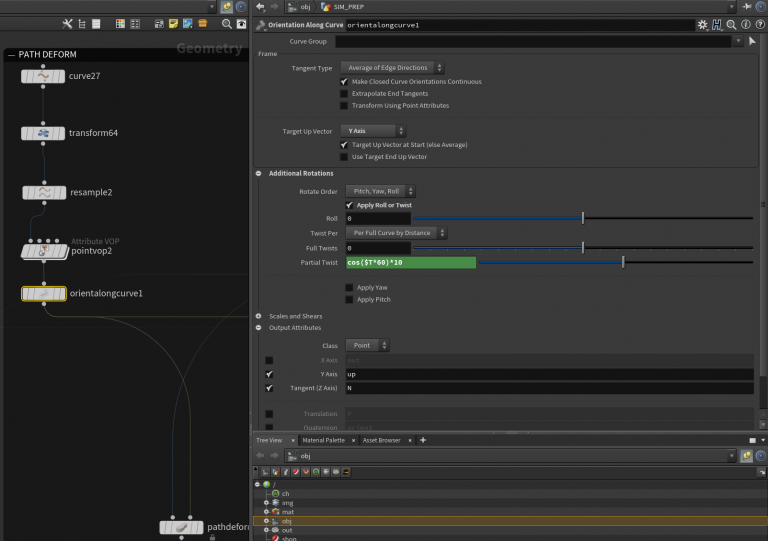
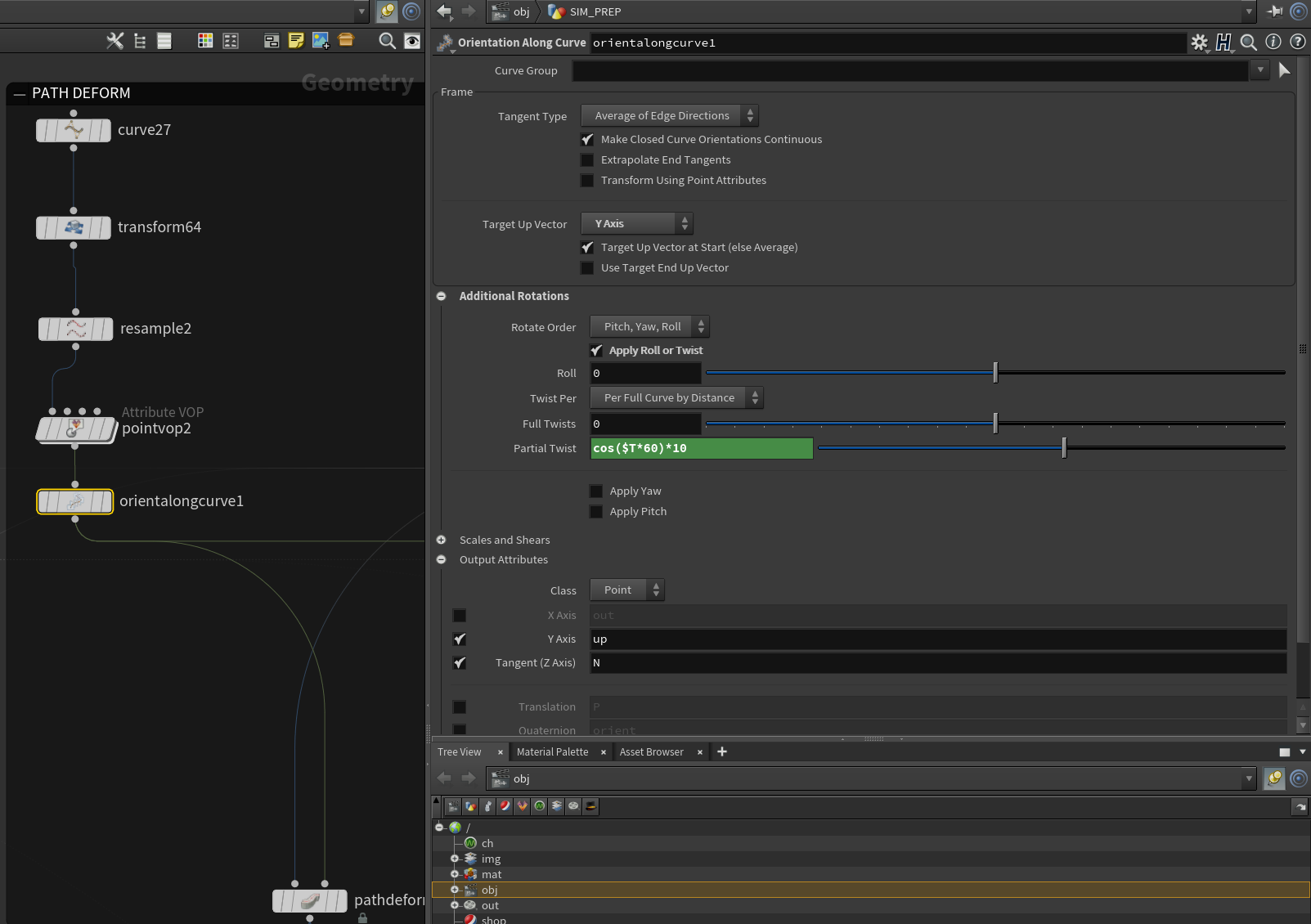
- Path deforming animation
-
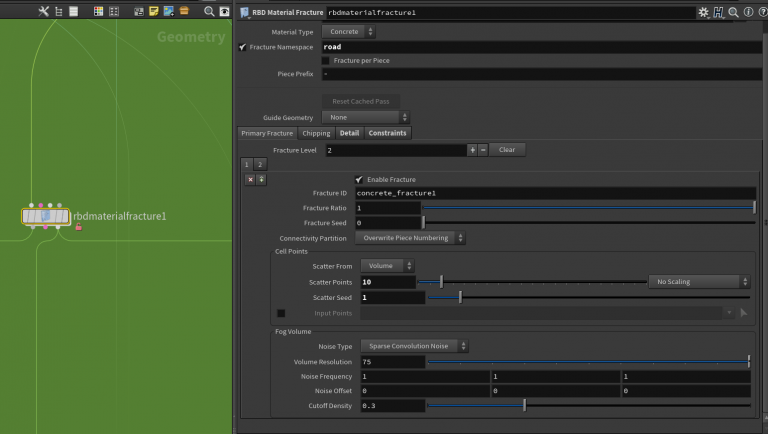
- RBD Material fracture

-
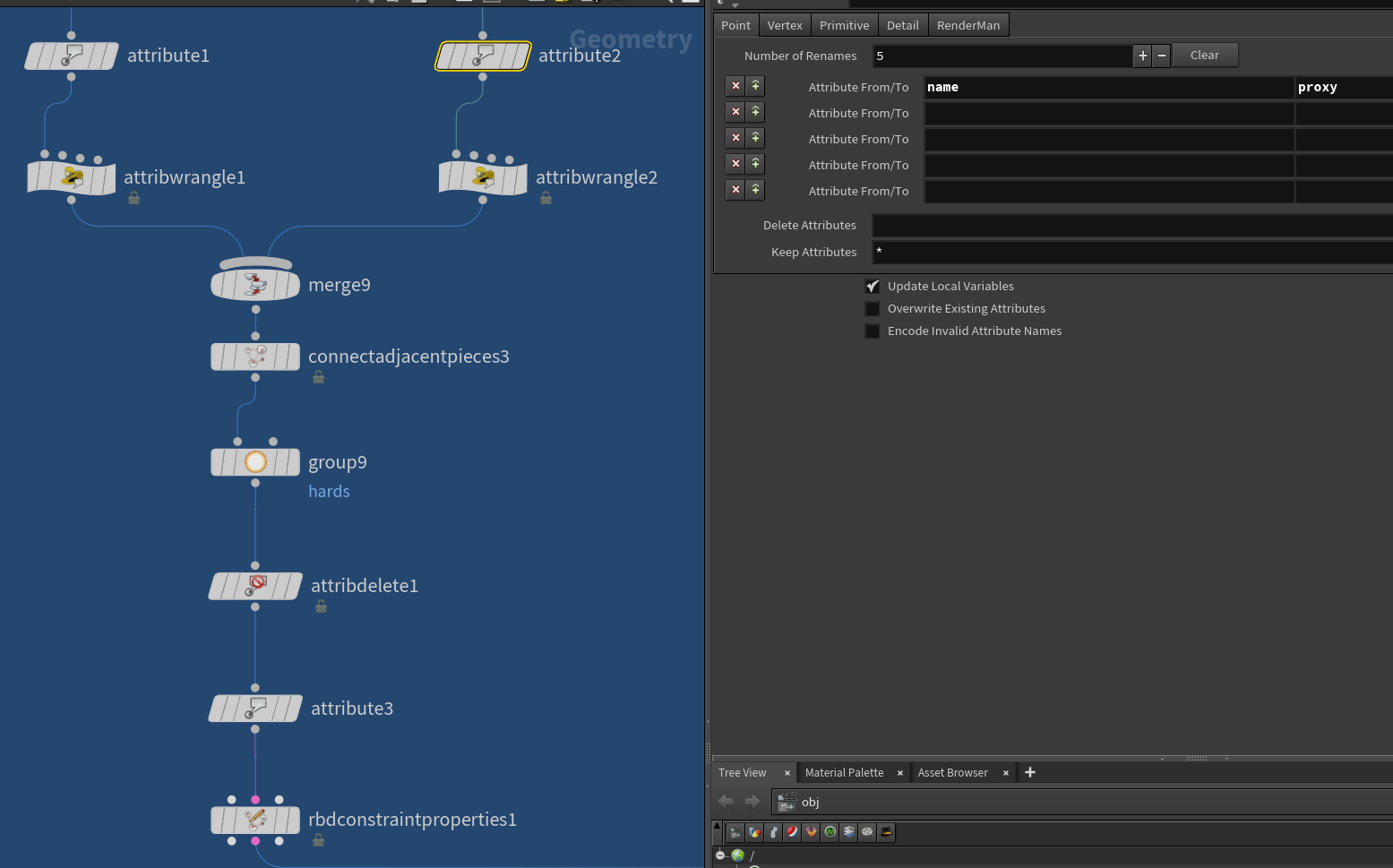
- Customize constraints
-
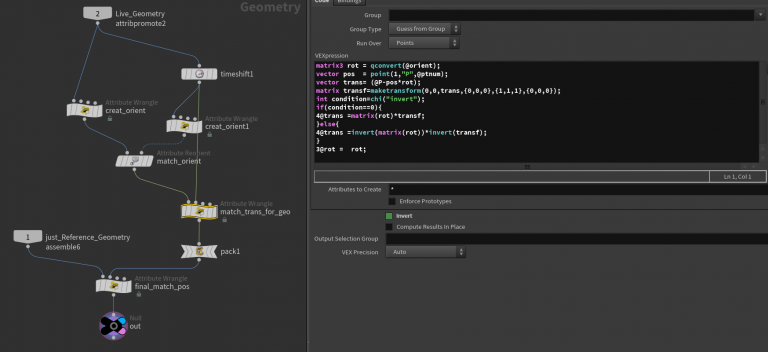
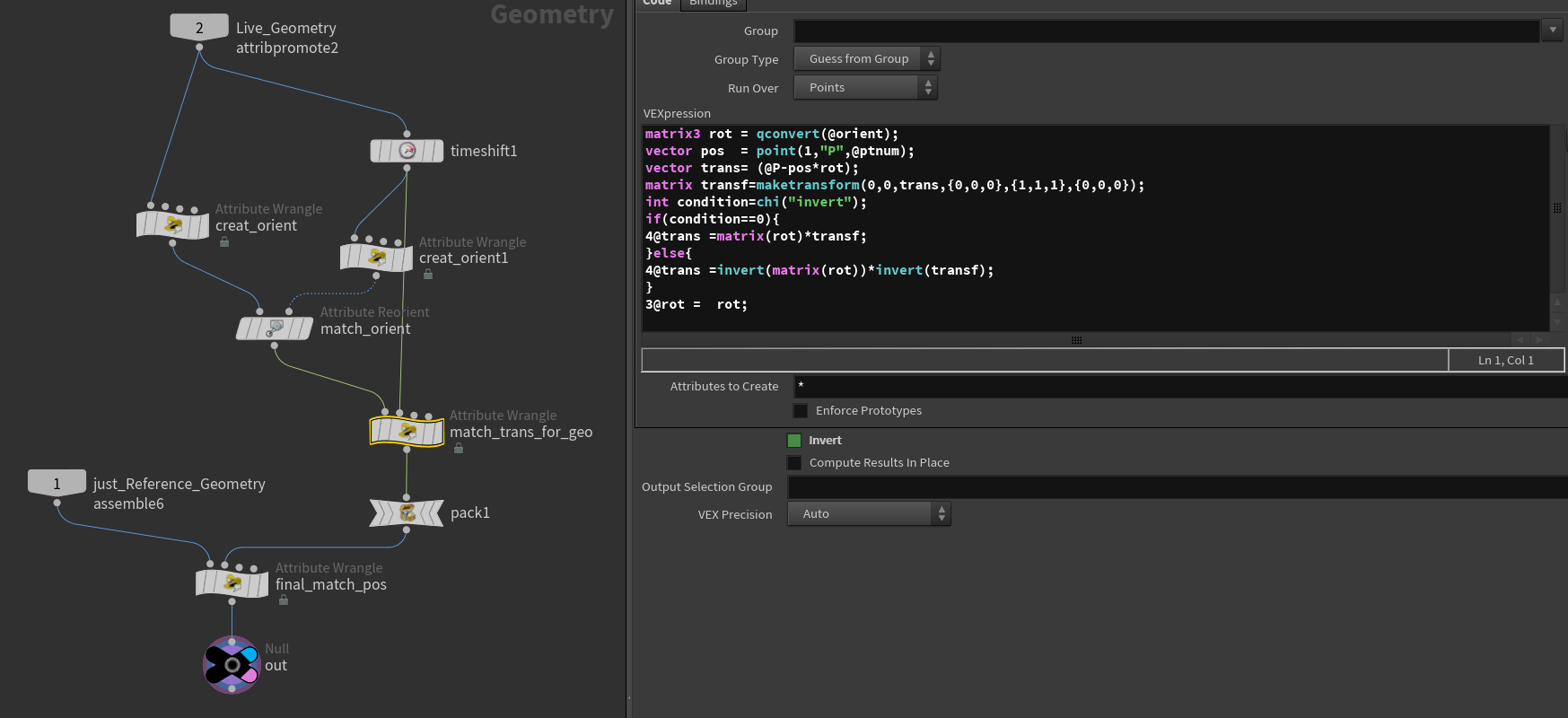
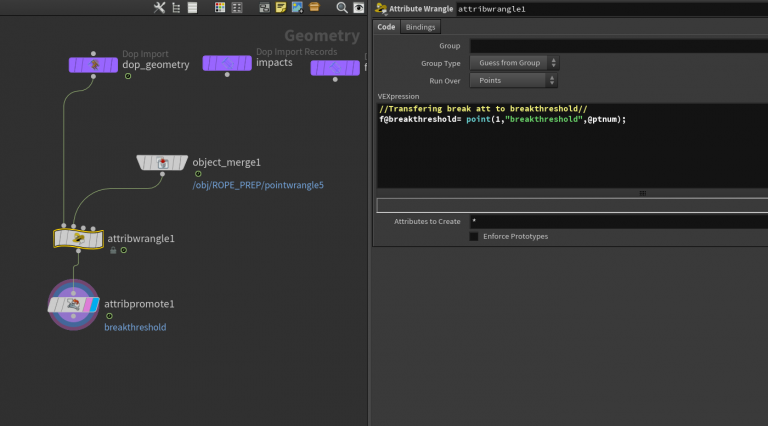
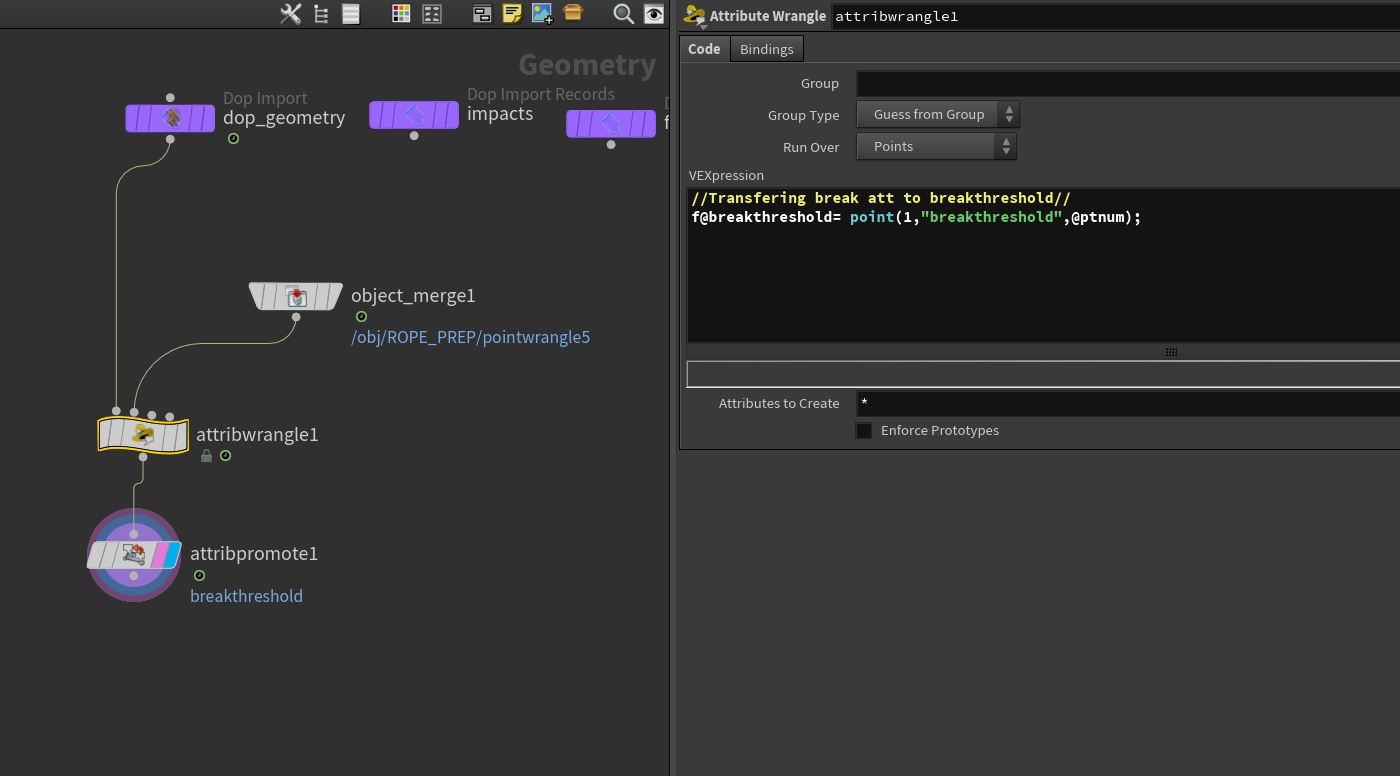
- Re-calculate animation data and store at the point level
-
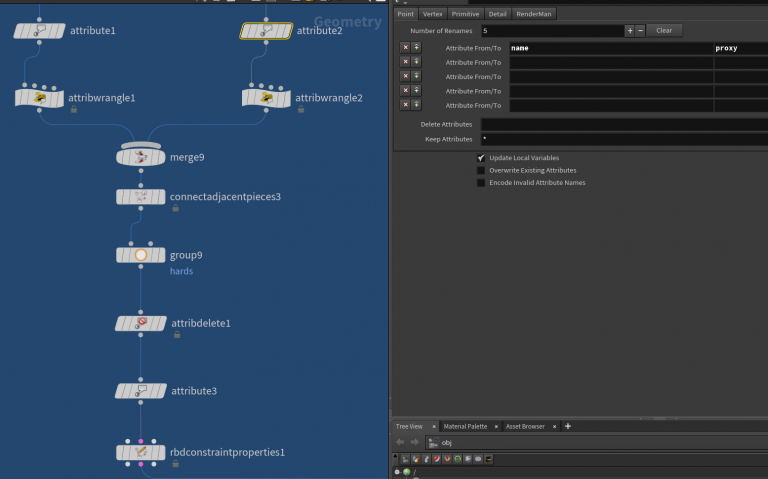
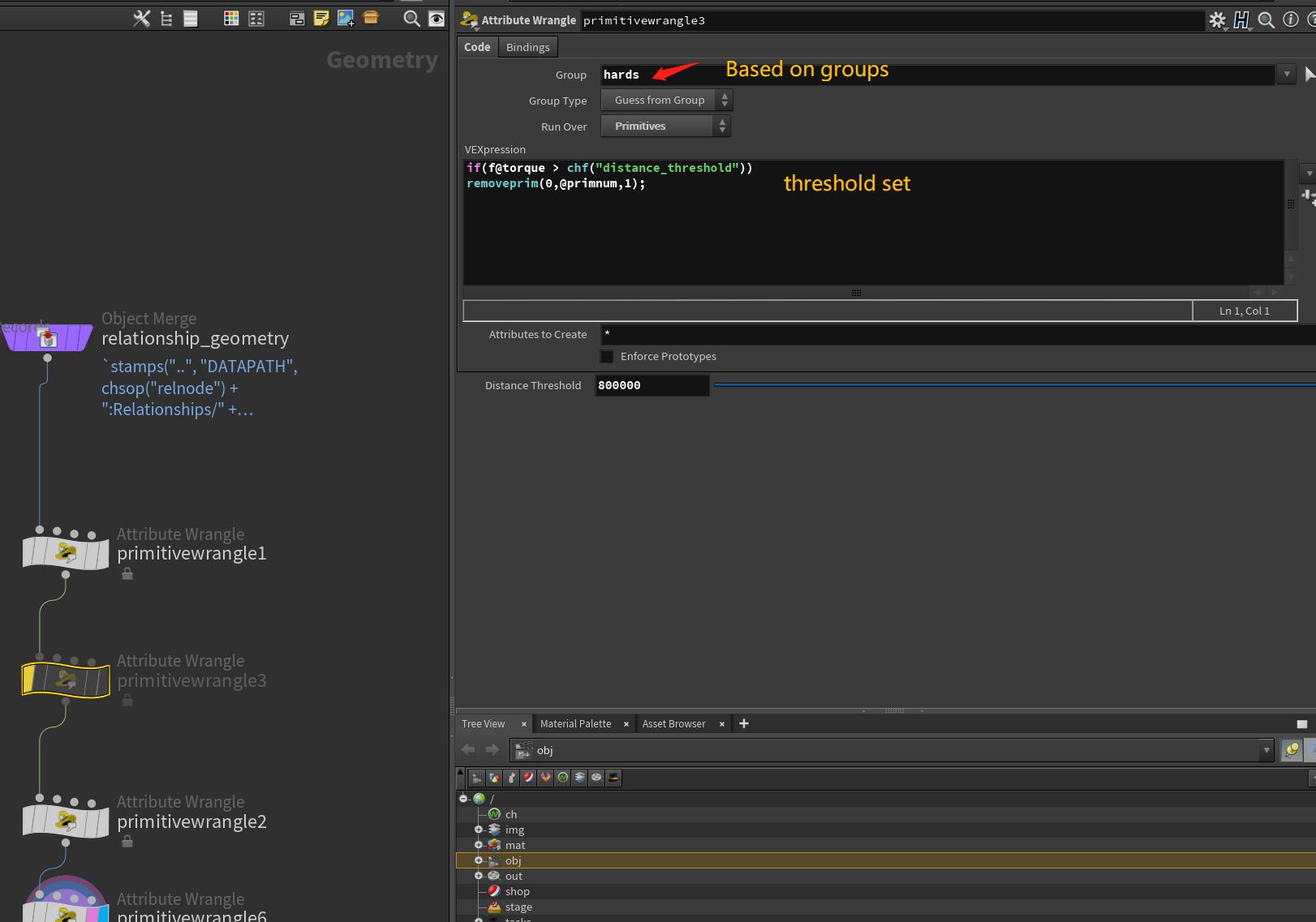
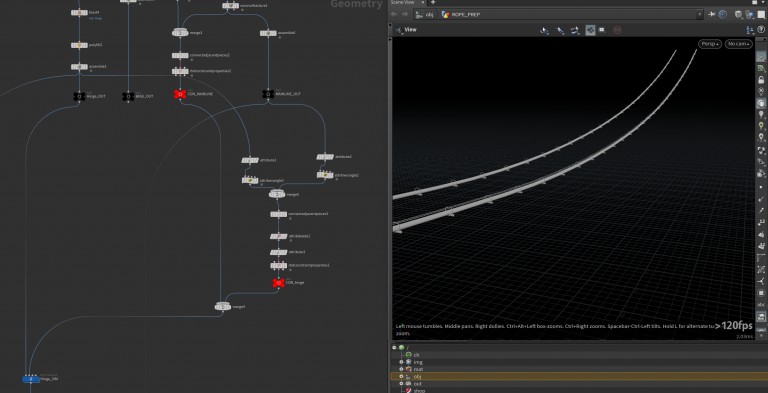
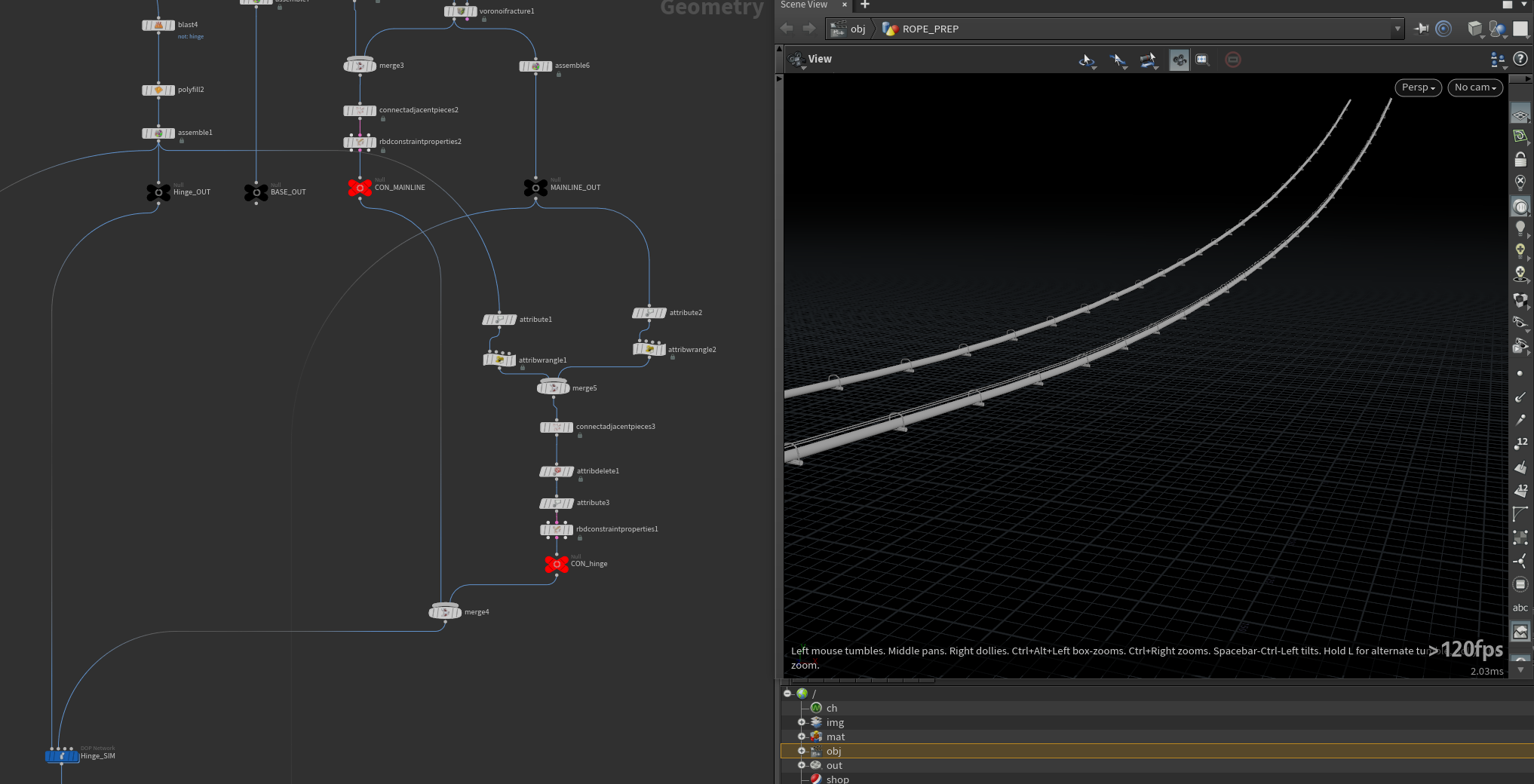
- Create constraints between groups
-
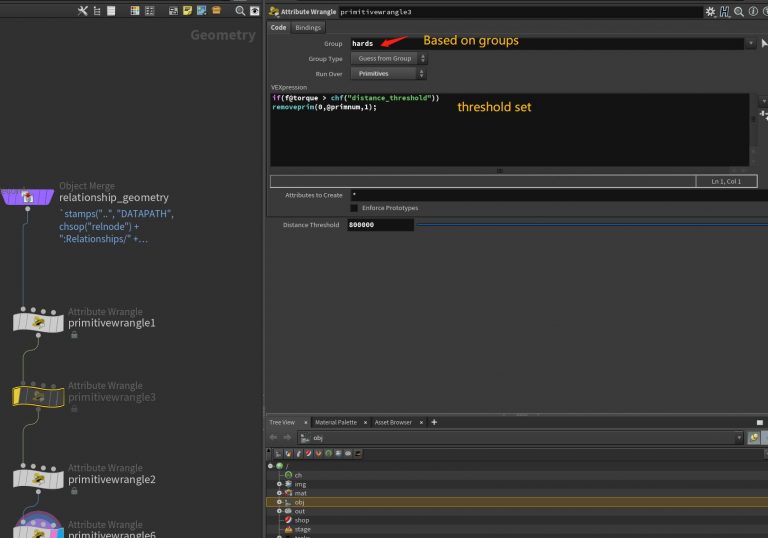
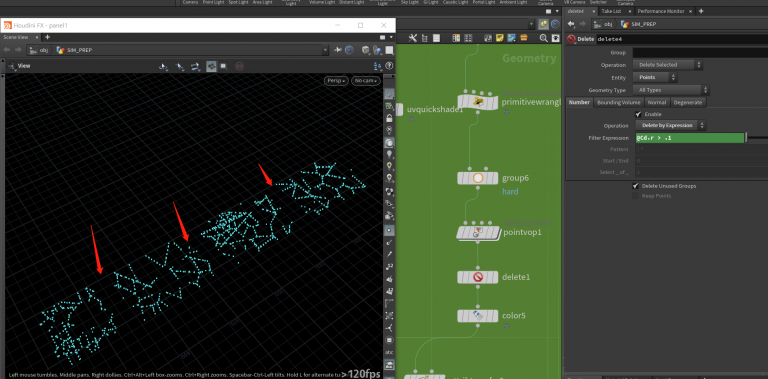
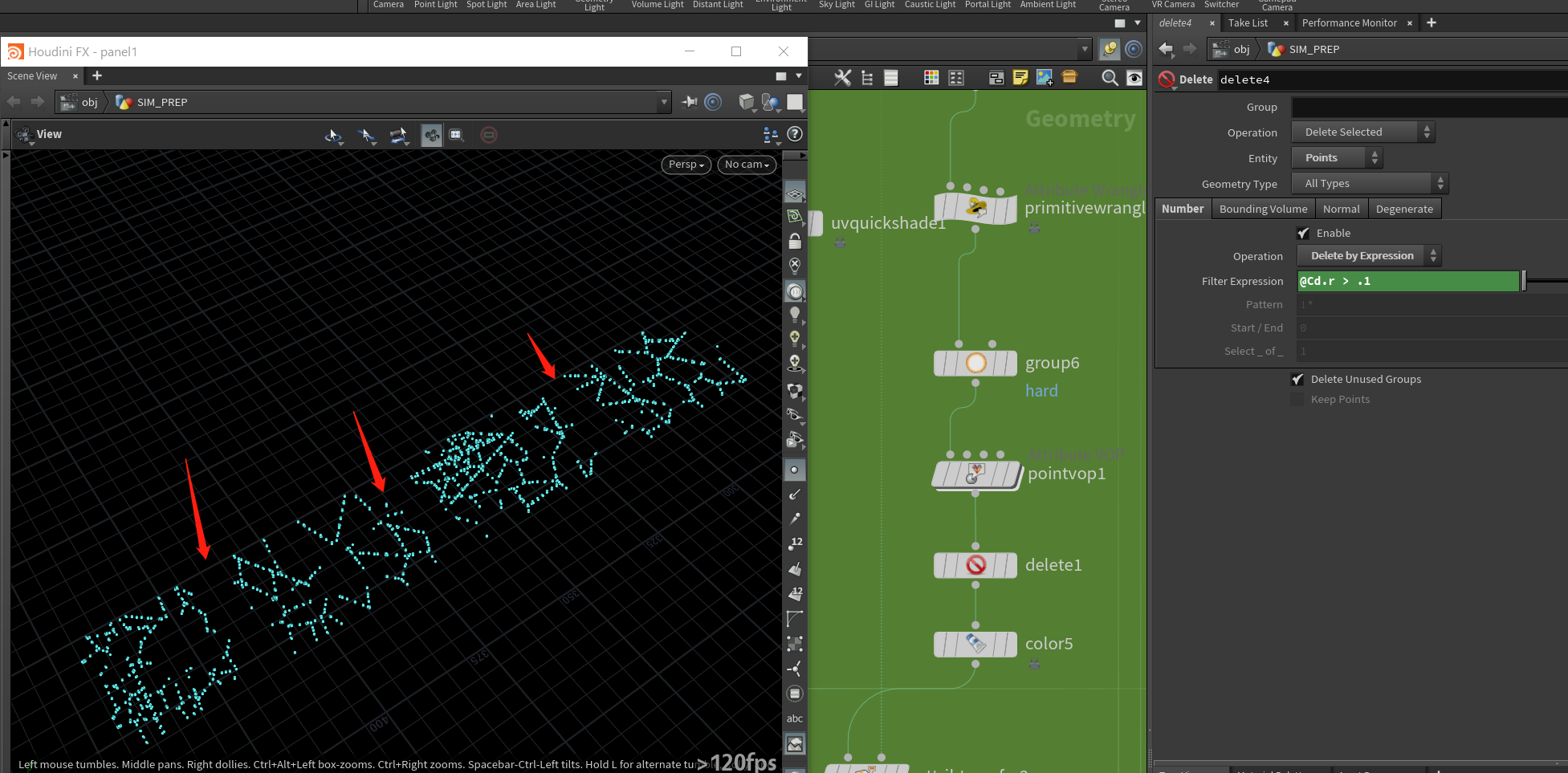
- Delete constraints based on calculated value
-
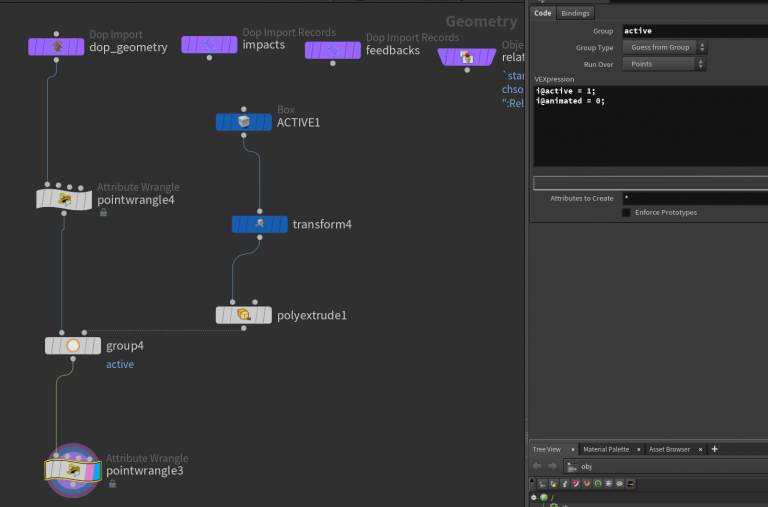
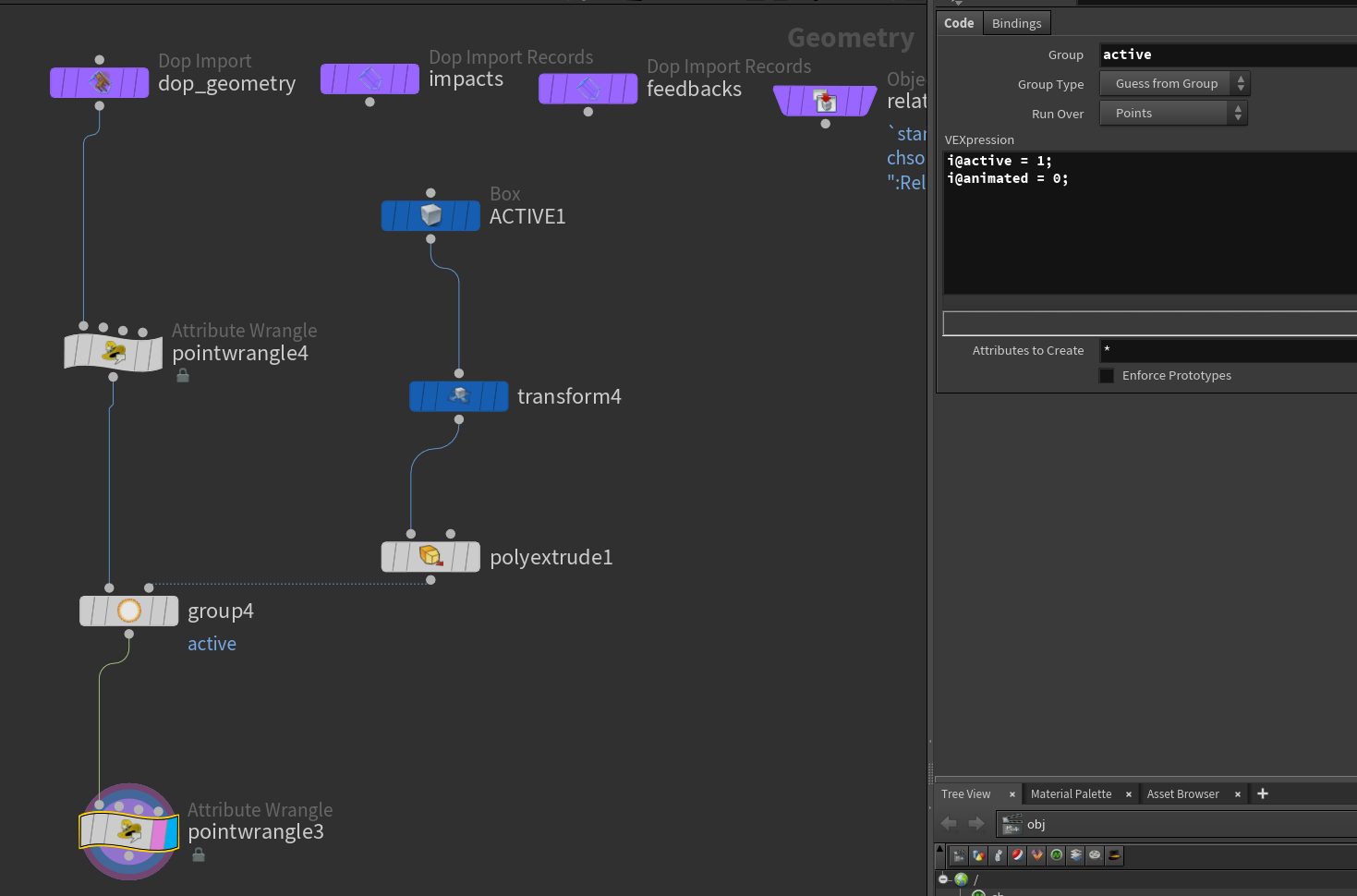
- Activate animated geometry inside sopsolver
-
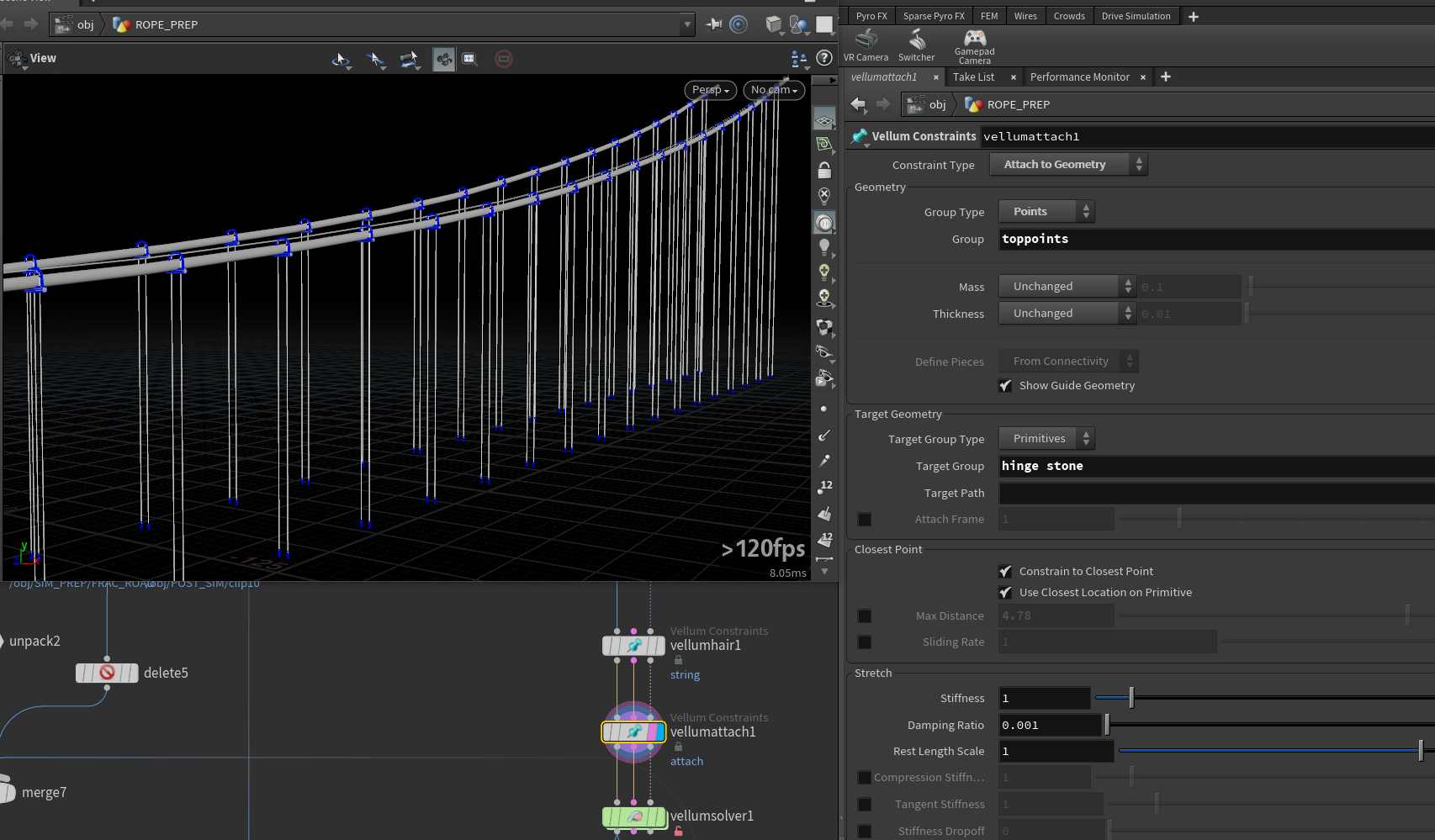
- The main suspension string simulation
-
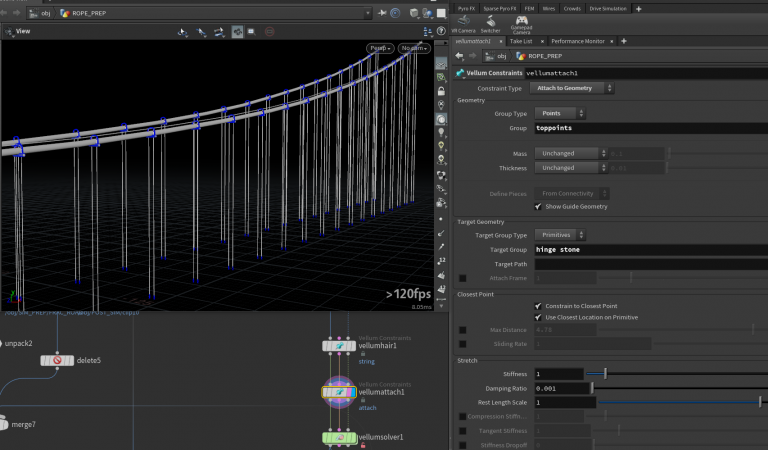
- The vertical wire vellum settings
-
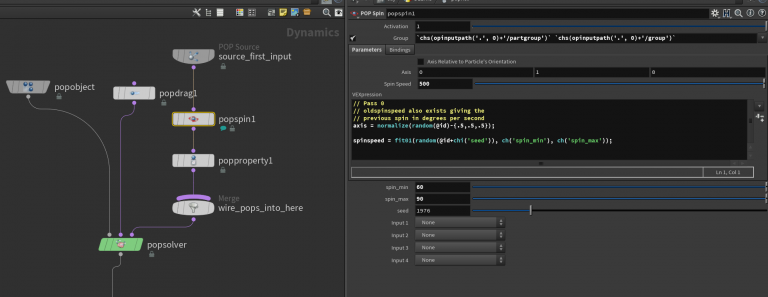
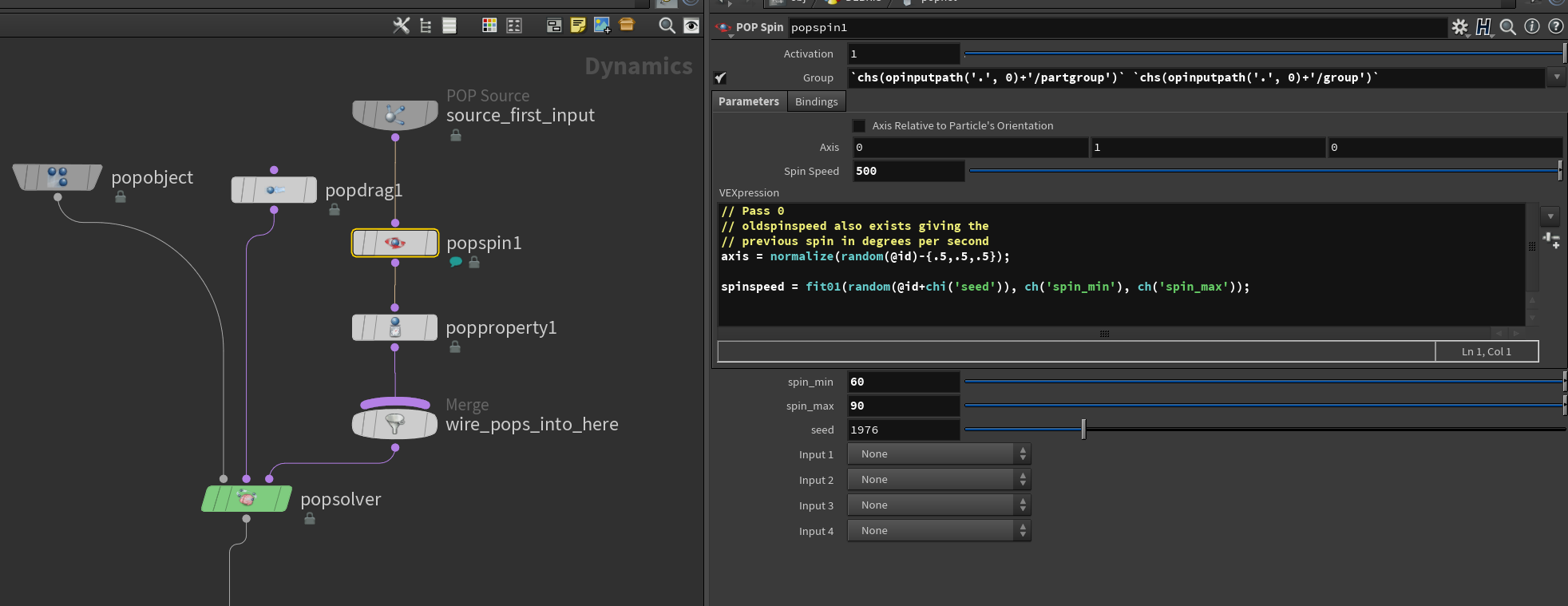
- Customize vellum constraint geometry
-
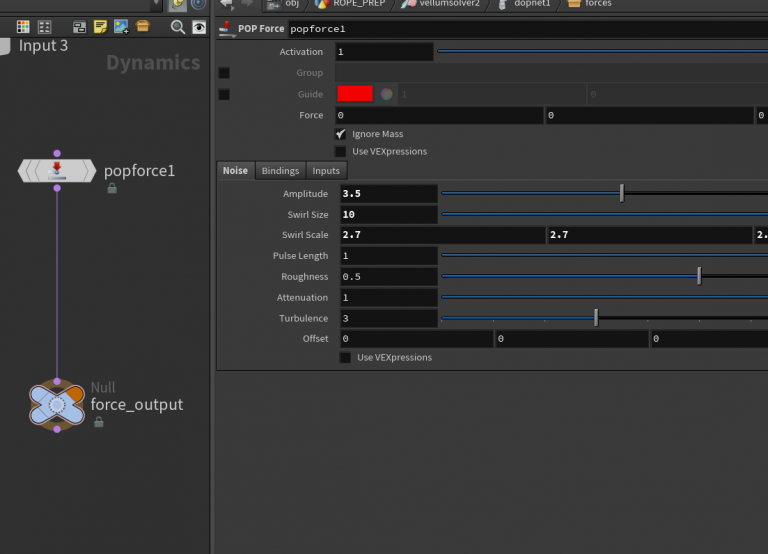
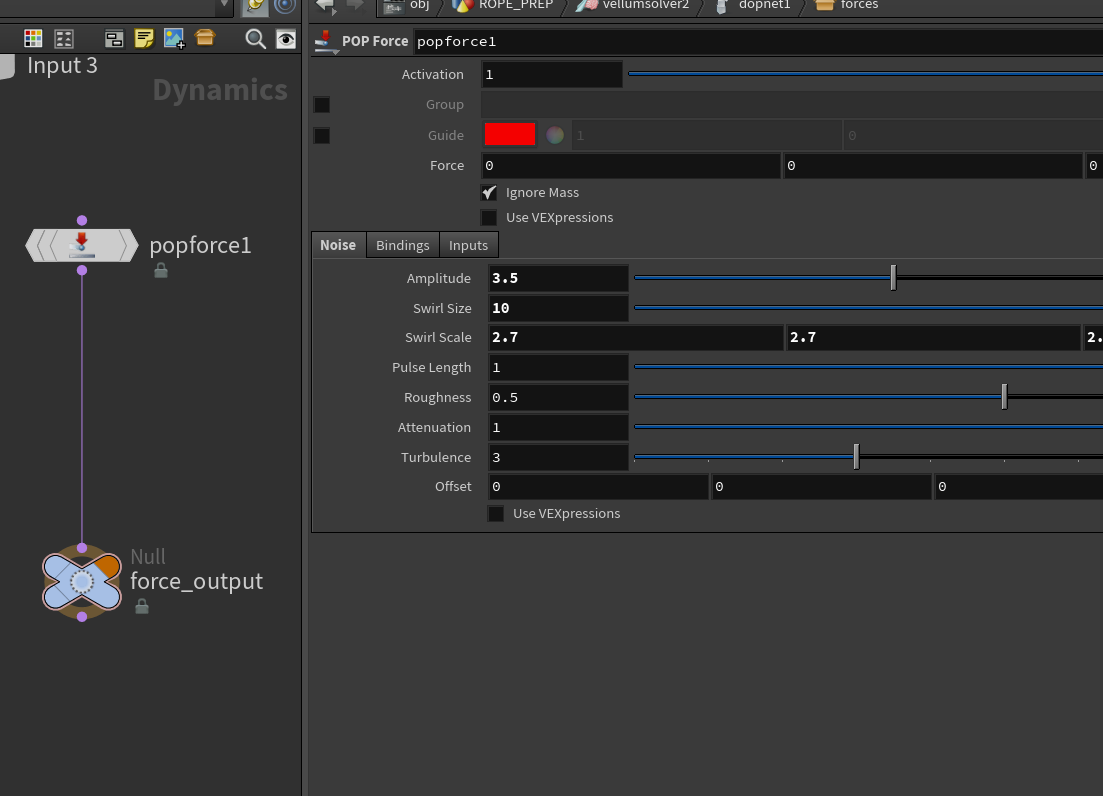
- Pop force for vellum initial status
-
- Debris simulation configures
-
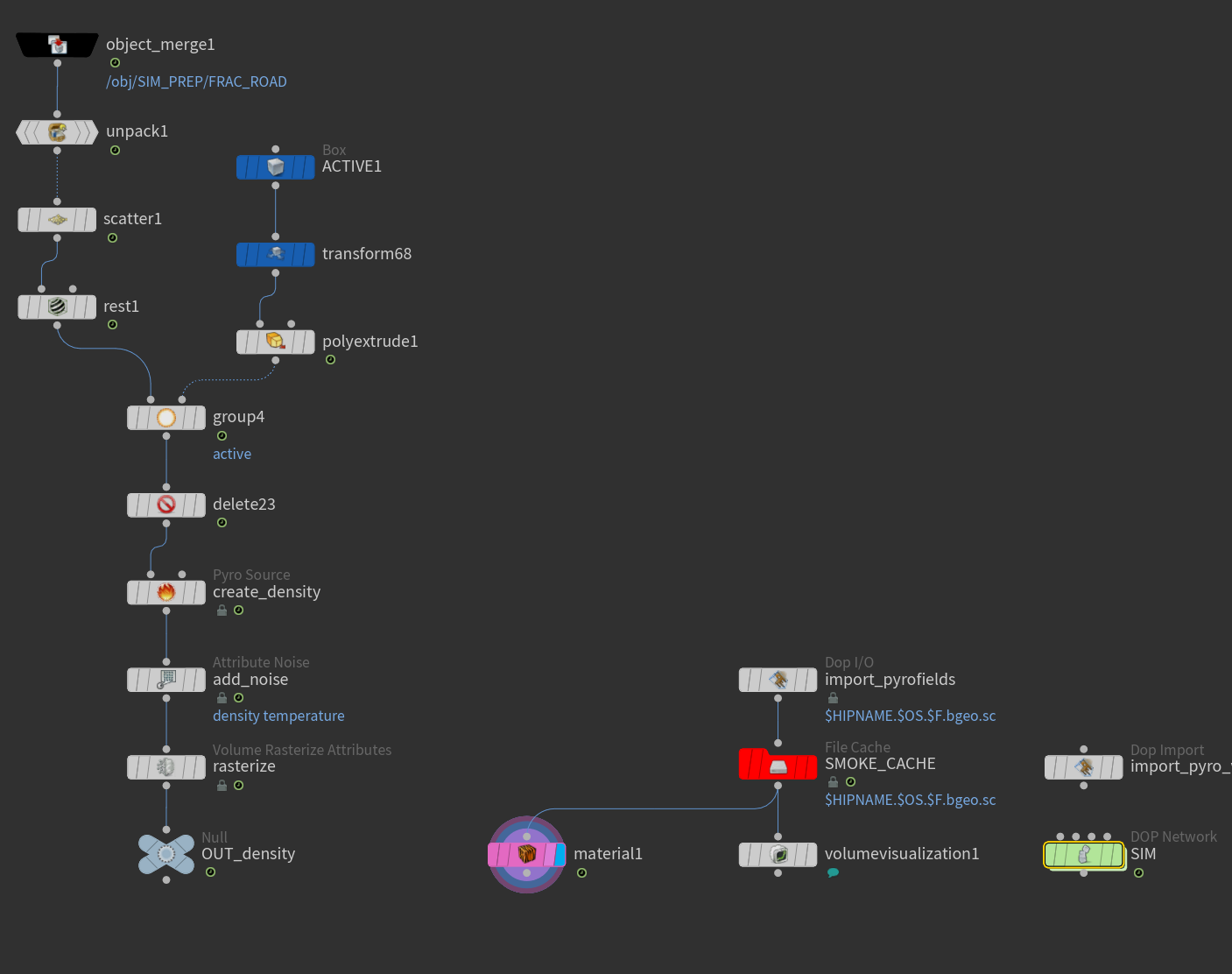
- Smoke simulation setup
-
- Water surface settings
-
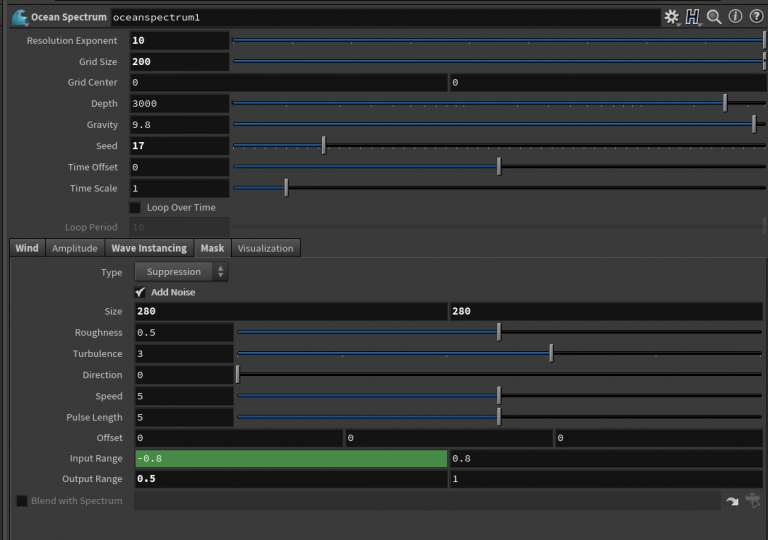
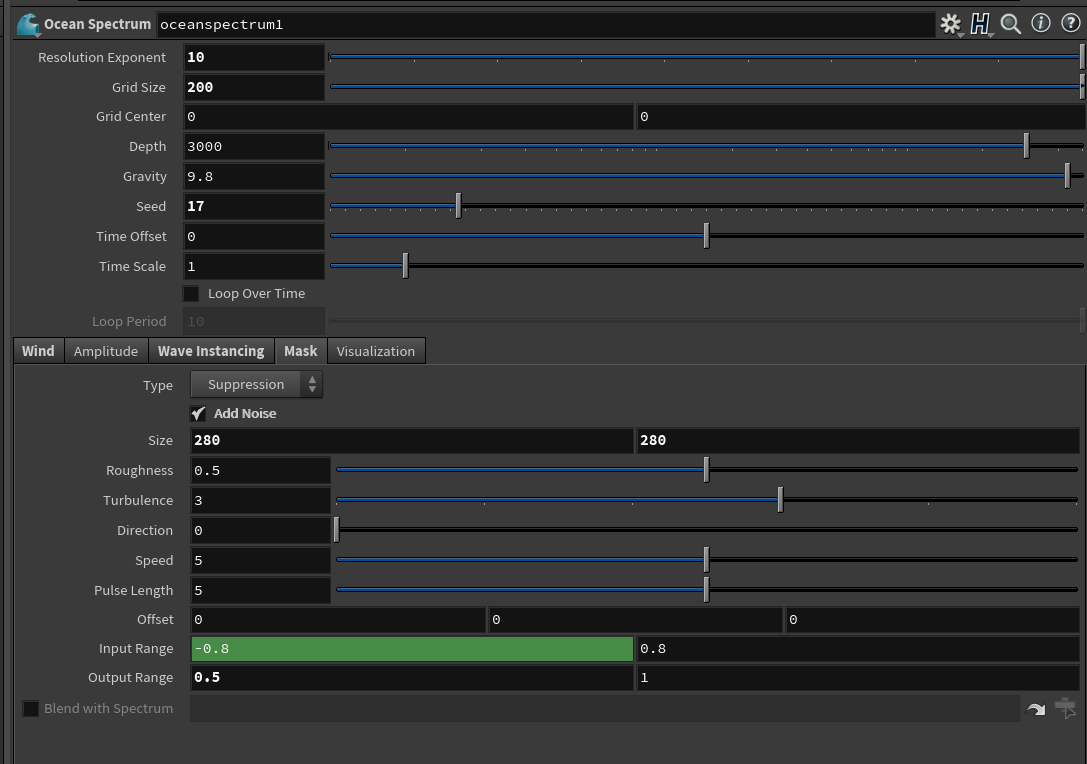
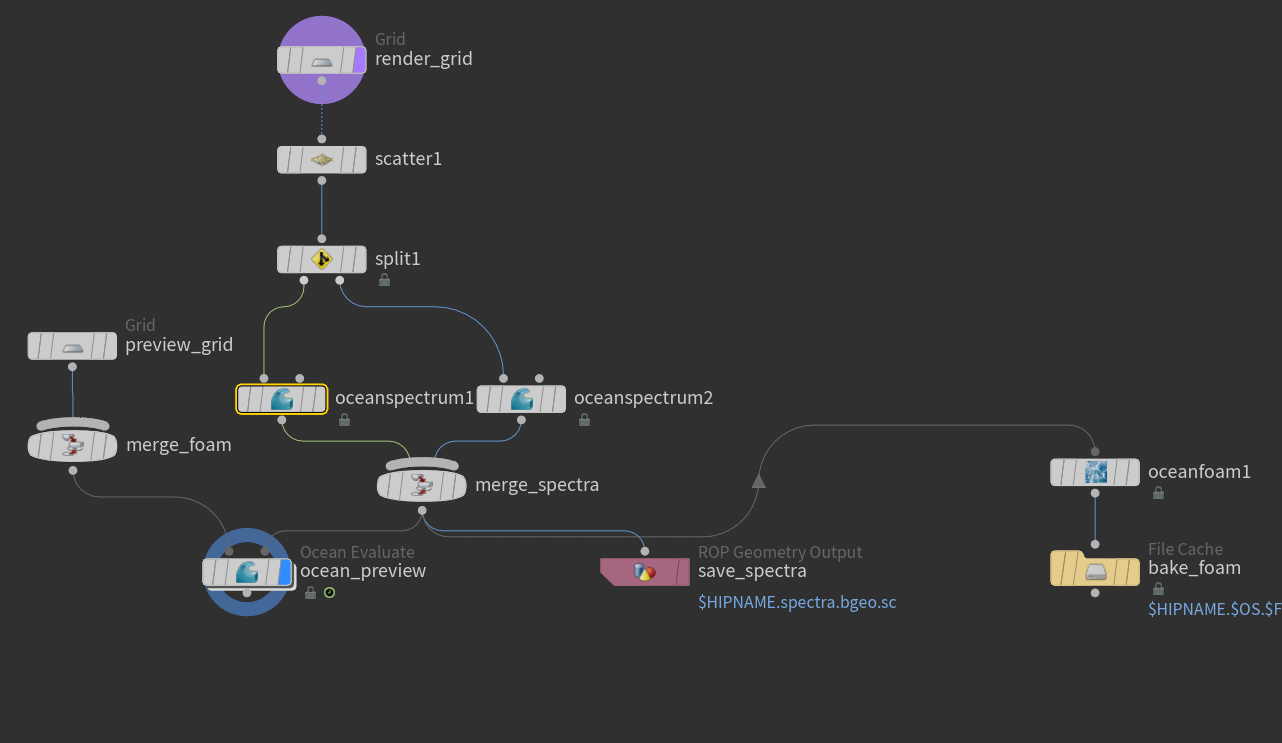
- Ocean spectrum settings